دانشکده فنی و مهندسی
طراحی و ساخت ربات ناهموارنورد توسط دانشجوی کارشناسی گروه مهندسی مکانیک
گروه مهندسی مکانیک
طراحی و ساخت ربات ناهموارنورد
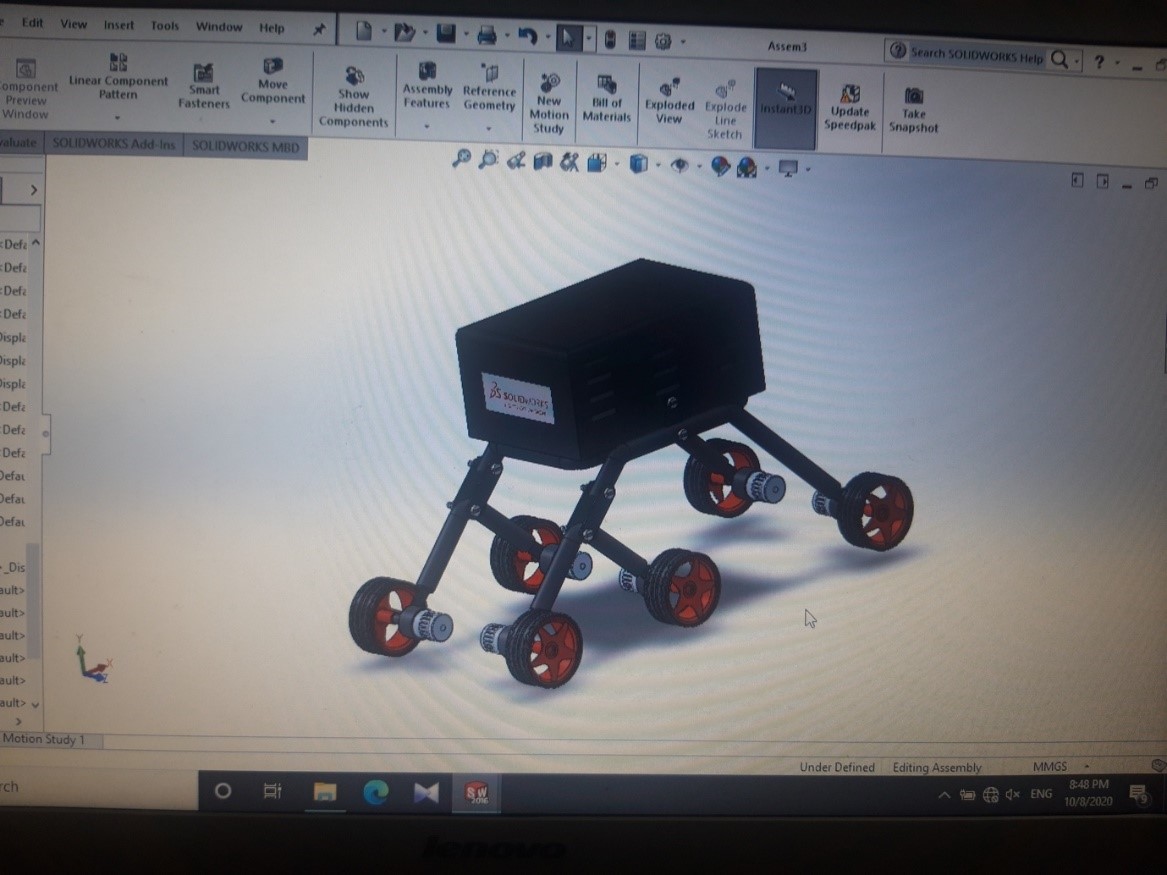
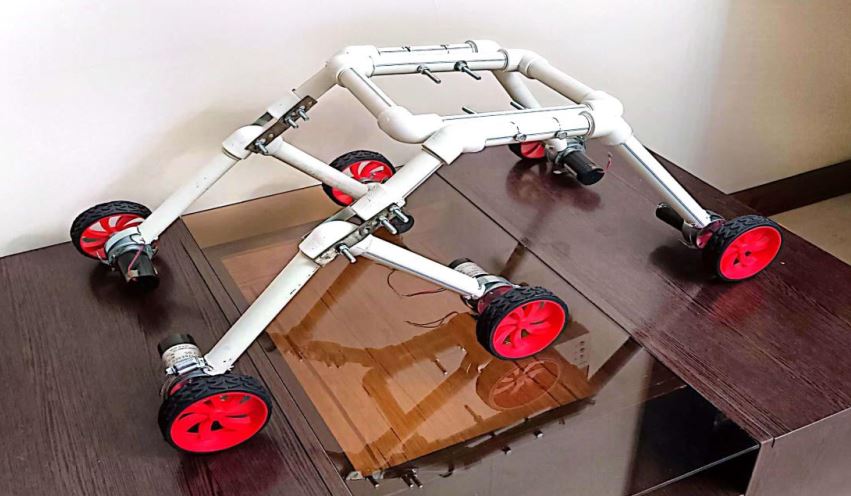
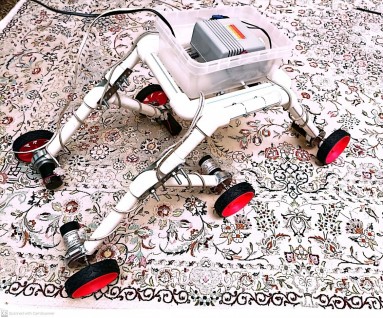
یکی از مکانیزمهای مفید برای ساخت رباتهای ناهموارنورد و رباتهای پله نورد استفاده از مکانیزم های صلیبی شکل، به جای استفاده از مکانیزم های معمولی است. با استفاده از این نوع مکانیزم ها کمتر شاهد لغزش و گیر کردن ربات در ناهمواریها خواهید بود. این پروژه ساخت در قالب یک پروژه پایانی کارشناسی توسط آقای محمد صدیق جهانی فر با سرپرستی و راهنمایی جناب آقای دکتر لقمانی انجام شده است. در نمونه ساخته شده که برای جلوگیری از لغزش چرخها بر روی پلهها، چسب بر روی آن زده شده است تا اصطکاک چرخ با سطوح صیقلی پلهها را افزایش دهد. در این پایان نامه به منظور طراحی یک ربات ناهموار نورد از قطعات مکانیکی خاصی استفاده شده است. در واقع این ربات ناهموار نورد قابلیت طی کردن مسیرهای مختلفی نظیر صخره یا سطوحی با فراز و فرودهای متفاوت را دارد. در طراحی این ربات ناهموار نورد موارد مختلفی اعمال شده است که عبارتند از بدنه اصلی، چرخ ها، پایه چرخ ها. طراحی این ربات ناهموار نورد در نرم افزار سالید ورک انجام شده است. در این نرم افزار ابتدا بدنه اصلی ربات ساخته شده و سپس پایه هایی از جنس لوله PVC به آن اضافه شده است. در قسمت جلویی این ربات از دو پایه برای چرخ ها (4 چرخ) استفاده شده است زیرا در ربات های ناهموار نورد لازم است حرکت پذیری قسمت جلویی زیاد باشد تا ربات بتواند سطوح مختلفی را طی کند. از طرفی در طراحی قسمت عقبی به 2 چرخ بسنده شده است زیرا قسمت عقبی ربات ناهموار نورد بیشتر نقش پیش رانش را بر عهده دارد و نیازی به گذر از موانع ندارد.